Föderales Lernen trainiert Roboter ohne Übergabe sensibler Daten
Wie Kommisionieraufgaben per Roboter durch KI-Methoden verbessert werden können, erforschte ein internationales Team im Rahmen des Projektes Flairop. Der Umgang mit den Trainingsdaten spielte dabei eine besondere Rolle.

Foto: Festo SE & Co. KG
Kommissionierroboter mit verteilten Methoden der Künstlichen Intelligenz (KI) intelligenter zu machen, war Ziel des Forschungsprojekts Flairop (Federated Learning for Robot Picking). Ein internationales Team untersuchte dabei, wie möglichst vielseitige Trainingsdaten aus mehreren Werken oder sogar Unternehmen genutzt werden können, um robustere und effizientere KI-Algorithmen zu entwickeln. Dabei sollten Daten mehrerer Roboter genutzt werden, ohne dass sensible Unternehmensdaten herausgegeben werden müssen. Beteiligt waren Experten vom Karlsruher Institut für Technologie (KIT), dem Automatisierungsspezialisten Festo aus Esslingen sowie Partnern aus Kanada von der Universität Waterloo sowie vom dortigen Unternehmen Darwin AI.
Maschinelles Lernen erlaubt sichere Handhabung unbekannter Objekte
„Wir freuen uns, dass es uns gelungen ist zu zeigen, dass Roboter voneinander lernen können, ohne sensible Daten und Betriebsgeheimnisse zu teilen. Dadurch schützen wir die Daten unserer Kunden und wir gewinnen zudem an Geschwindigkeit, weil die Roboter auf diese Weise viele Aufgaben schneller übernehmen können. So können die kollaborativen Roboter zum Beispiel Produktionsmitarbeiter bei sich wiederholenden, schweren und ermüdenden Aufgaben unterstützen“, sagte Jan Seyler, Leiter Advanced Development Analytics and Control bei Festo anlässlich des Projektabschlusses.
Lesetipp: Bedarf an Robotern in Deutschland steigt – VDMA erwartet 2023 neuen Umsatzrekord
KIT-Experte Maximilian Gilles fügte hinzu: „Wir haben einen universellen, simulationsbasierten Datensatz entwickelt, mit dem wir autonome Greifroboter so trainieren können, dass sie in der Lage sind, auch solche Artikel zuverlässig zu greifen, die sie vorher noch nicht gesehen haben.“ Zukünftig soll das Federated-Learning-System (föderal lernendes System) dahingehend weiterentwickelt werden, dass die Plattform es verschiedenen Unternehmen ermöglicht, Robotersysteme gemeinsam zu trainieren, ohne untereinander Daten teilen zu müssen. Das kann die Akzeptanz solcher Systeme in der Praxis erhöhen.
Föderales Lernen hilft beim Schutz sensibler Daten in der Fabrik
Das föderale Lernen ist also eine Technik des maschinellen Lernens, mit der der Datenschutz bei KI-Anwendungen bewahrt werden kann. Das Modell wird dazu an vielen Stellen trainiert, anstatt die Trainingsdaten der Roboterarme aus den Kommissionierzellen an einen zentralen Server zu senden. Erst dann werden die lokal trainierten Modelle an den zentralen Server für maschinelles Lernen gesendet. Damit bleiben die sensiblen Trainingsdaten bei den Datenlieferanten. Indem es die verteilten Modelle aggregiert und letztlich eine hochpräzise und datengesteuerte Vorhersage der Objekterkennung und der Greifpunkte ermöglicht, erlaubt die Methode damit ein Lernen über Datensilos hinweg.


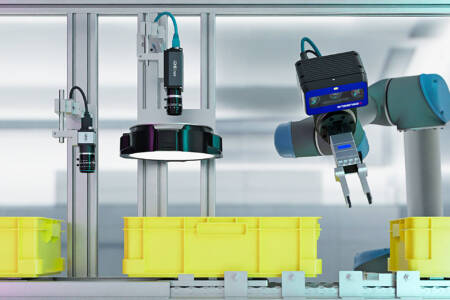
Um die vor ihnen liegenden Gegenstände visuell erfassen zu können, sind die Roboterarme in den Kommissionierzellen mit Kameras ausgestattet. Anhand des Kamerabildes erkennt die Technik automatisch die verschiedenen Artikel und wählt ein geeignetes Greifverfahren aus. Aufgrund der Vielfalt der Gegenstände in einem Industrielager kann das eine komplizierte Aufgabe sein. Deshalb werden große Datenmengen benötigt, um vernünftige Ergebnisse zu erzielen. Auf klassischem Weg ist die Erfassung der nötigen Datenmengen zeitaufwendig. Mit Daten, die von Kommissionierzellen in verschiedenen Organisationen gesammelt wurden, konnte die Greifvorhersage für Kommissionierzellen laut dem Entwicklungsteam verbessert werden.
Lesen Sie auch: Intel investiert in humanoide Roboter
Während des Projektes wurden dazu für das Training der Roboter insgesamt fünf autonome Kommissionierstationen aufgebaut: zwei am KIT-Institut für Fördertechnik und Logistiksysteme (IFL) sowie drei bei der Festo in Esslingen am Neckar. „Die Forschungsergebnisse werden nun veröffentlicht und können von allen Interessierten frei in ersten Pilotprojekten genutzt werden“, freut sich Festo-Mitarbeiter Seyler. Für sein Unternehmen geht es nun um die Verwertung der Ergebnisse in den eigenen Produkten.