Humanoide Roboter für die Industrie in greifbarer Nähe
Selbstlernende Lösungen treiben die Entwicklung von Assistenzsystemen und kollaborierenden Robotern voran.
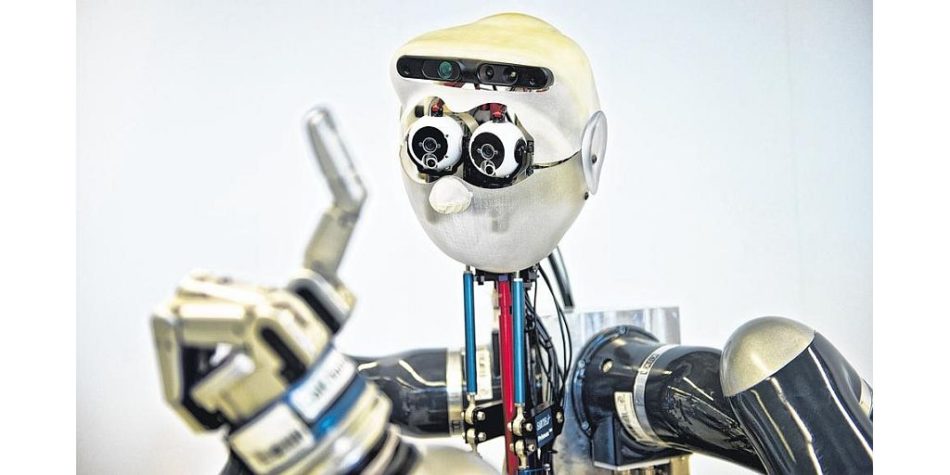
Foto: Max-Planck-Institut für Intelligente Systeme/Wolfram Scheible
Wer schon einmal die Mimik des humanoiden Roboters Sophia der Hongkonger Firma Hanson Robotics gesehen hat, der hat bereits einen Eindruck davon, wie menschenähnlich die Robotik in Verbindung mit Künstlicher Intelligenz (KI) inzwischen ist. Das kann auch für industrielle Anwendungen interessant sein. Dort geht es allerdings weniger um smartes Auftreten, sondern vor allem darum, Menschen bei monotonen oder ergonomisch ungünstigen Arbeitsschritten zu entlasten.
„Die Beschäftigten werden sich freuen, mit dem Kollegen Roboter gemeinsam zu werkeln“, sagt z. B. Marc-André Weber, wissenschaftlicher Experte des Instituts für angewandte Arbeitswissenschaft (ifaa). Er referierte auf der 4. VDI-Fachkonferenz „Assistenzroboter in der Produktion“ Ende 2017 in Aschheim bei München.
Kollaborierende Roboter und Assistenzsysteme werden bereits vielerorts erprobt. Manipulatoren gibt es mit einem oder zwei Roboterarmen. Sie erledigen Aufgaben stationär oder von mobilen Plattformen aus. Frank Kirchner vom Deutschen Forschungsinstitut für Künstliche Intelligenz (DFKI) prognostiziert, dass auch humanoide Roboter in vier bis fünf Jahren als Assistenzroboter einsatzbereit sein könnten.
Gerade in Umgebungen, die die Anwesenheit von Menschen erfordern, erscheint das sinnvoll. Dort sind Roboter mit Beinen und Armen, die Treppen gehen und Hindernisse überwinden können sowie multifunktionale Fähigkeiten besitzen, flexibel einsetzbar. Sie können zudem Maschinen und Werkzeuge nutzen, die für die menschliche Anatomie konzipiert wurden. Erforscht wird der Einsatz humanoider Roboter z. B. in der Fahrzeug- und Flugzeugmontage. Wie Teamarbeit dort konkret aussehen kann, will das vom Bundesforschungsministerium (BMBF) geförderte Projekt Hybr-iT bis Oktober 2019 demonstrieren.
Wie es wahrgenommen wird, wenn humanoide Roboter unsere Umwelt bevölkern, hat Markus Appel von der Universität Würzburg in einer ebenfalls vom BMBF geförderten Studie zusammen mit Wissenschaftlern der Universität Koblenz-Landau untersucht. Dabei kam heraus, dass ein Roboter desto eher akzeptiert wird, je weniger er dem Menschen ähnelt. Je menschlicher die Züge des Roboters waren, desto unbehaglicher fühlten sich die Probanden. „Die Grenzen von Mensch und Maschine scheinen durch den humanoiden Roboter aufgelöst zu werden und das wirkt unheimlich“, sagt Appel. Als intelligentes Werkzeug dürften Roboter hingegen Menschen ähneln.


Bedacht werden sollte allerdings, dass Menschen Absichten in Dinge hinein interpretieren. Felix Reinhart, Experte für Maschinelles Lernen und Data Analytics am Fraunhofer-Institut für Entwurfstechnik Mechatronik IEM in Paderborn, weiß, dass ein humanoider Roboter den Eindruck erwecken kann, mehr zu können, als es tatsächlich der Fall ist. Bisher seien in der Industrie Robotersysteme im Einsatz, die sich immer gleich verhalten. Damit agieren sie berechenbar und Mitarbeiter sind daran gewöhnt.
In Zukunft könnten humanoide Roboter als „Cobots“ arbeiten und selbstständig lernen. „Wir arbeiten daran, dass beim Lernen gewisse Grenzen und Nebenbedingungen einzuhalten sind, um die Sicherheit des Menschen zu gewährleisten“, sagt Reinhart. In vielen Forschungsprojekten seien deswegen nicht nur Maschinenbauer, Elektrotechniker, Informatiker und Forscher der Künstlichen Intelligenz (KI) involviert, sondern auch Rechtsanwälte, Psychologen, Philosophen und Arbeitsrechtler, um z. B. ethische Fragen zu klären.
Der Mensch ist nicht einfach nachzubauen. „Ein humanoider Roboter hat je nach Bauart etwa 50 Gelenke, die angetrieben werden müssen. Hinzu kommen Kamerasysteme und viele weitere Sensoren“, erläutert Reinhart. Lernmethoden für Roboter würden ebenfalls vom Menschen abgeschaut: von der Mustererkennung über Imitationslernen, Lernen im sozialen Kontext bis hin zum abstrakten Denken. „Die Basis dafür sind Daten, deren clevere Akquisition eine Herausforderung ist“, sagt er. Herauszufinden, ob eine Bewegung gut oder nicht so gut war, sei zeitaufwendig und verschleiße so manche Hardware – etwa Zahnräder in Getrieben.
Selbstlernende Maschinen werden in einem dynamischen Umfeld ständig neu herausgefordert. Schließlich soll sich der humanoide Roboter in einer ihm unbekannten Umgebung zurechtfinden können. Dazu muss er die Daten, aus denen er lernt, selbst generieren, schreibt Sebastian Trimpe in dem Forschungsbericht „Lernende Roboter“ von 2015. Der Forschungsgruppenleiter im Max-Planck-Institut für Intelligente Systeme in Tübingen arbeitet an selbstlernenden Regelsystemen, die wahrnehmen, handeln und lernen.
Ein Grundproblem dieser Systeme sieht er darin, die optimalen Parameter für Regler von Aktuatoren aus experimentellen Daten automatisiert zu finden. „Wir haben einen Algorithmus, der Parameter systematisch ausprobiert. Anhand der Sensordaten sieht er dann, wie gut der Regler funktioniert. Diese Daten nutzt der Algorithmus dann wieder, um am Ende die besten Parameter zu finden“, sagt Trimpe. So lernt ein humanoider Roboter z. B. einen Stab zu balancieren, wie die Wissenschaftler des Bereichs autonome Motorik bewiesen haben. Solche Entwicklungen rücken den Einsatz von Assistenzrobotern oder Cobots in der Industrie in greifbare Nähe.








