Miniroboter taucht durch Eis in unbekannte Welten
Noch ist es nicht so weit. Doch in Bremen laufen bereits die Vorbereitungen für einen außergewöhnlichen Robotereinsatz. Es geht darum, die Gewässer unterhalb der Eisschicht der Antarktis zu erforschen.
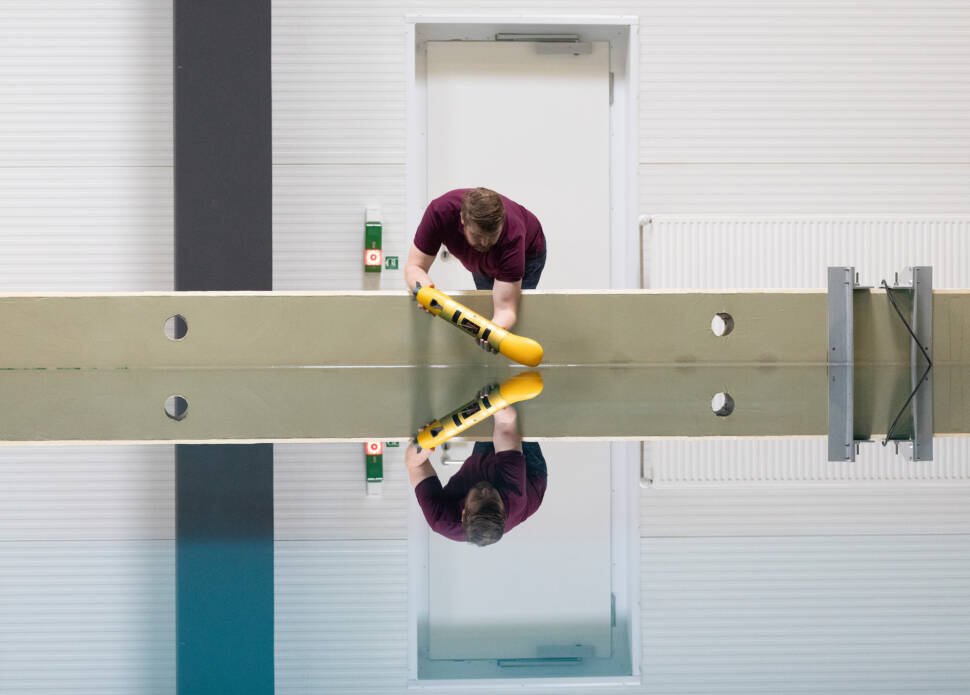
Foto: TRIPLE-IceCraft, GSI GmbH/RWTH Aachen
Wie sieht die Unterwasserwelt unter den Eisschichten der Erde aus? Dieser Frage wollen Forschende der „U Bremen Research Alliance“ nun nachgehen. Dafür haben sie einen Miniroboter entwickelt, der im Inneren einer Schmelzsonde letztlich durch einen 4000 m dicken Eispanzer transportiert werden soll – zunächst in der Antarktis. Später könnten auch Eisflächen und Wasservorkommen auf anderen Planeten damit erforscht werden. Ihre Arbeit ist Teil des Verbundprojektes „Triple“, das aus mehren Einzelprojekten besteht. Die Abkürzung steht dabei für „Technologies for Rapid Ice Penetration and subglacial Lake Exploration“.

Schmelzsonde soll den Miniroboter zum Einsatzort bringen
Damit der Roboter seine Arbeit unter dem Eis aufnehmen kann, muss das Team ihn zunächst in einer Schmelzsonde sicher unter die Eisschicht bekommen. Die Sonde wurde bereits in einem vorherigen Forschungsprojekt entwickelt. Sie wird über ein externes Kabel mit Energie versorgt und schmilzt sich so kontinuierlich durch die Eisschicht. Mit etwa 2 m/h bis 3 m/h geht es dabei nach unten. Die Sonde taucht dabei durch das Wasser im Schmelzkanal.

Weil das Wasser hinter der Sonde wieder gefriert, verfügt die Sonde über eine interne Abwickelvorrichtung für das Kabel. Mit der wird das Kabel auf dem Weg zurück auch wieder aufgewickelt. Damit kann auf den Einsatz von Frostschutzmitteln im Schmelzkanal verzichtet werden. Außerdem wird dadurch ein „Blowout“ der Schmelzsonde durch eine Druckdifferenz zum subglazialen Wasserkörper verhindert. Die Funktion der Sonde namens „Triple-Icecraft“ wurde bereits Februar 2023 erfolgreich in der Antarktis getestet.
Feldversuch mit dem Roboter ist für 2027 in der Antarktis geplant
Nach dem erfolgreichen Transport tritt der Roboter in Aktion: „Wenn alles gut läuft“, sagt Sebastian Meckel, „öffnet sich die Tür der Sonde, die Dockingstation setzt den Roboter aus, er fährt los, macht seine Messungen, kommt zurück und kann wieder aufgeladen werden.“ Ob alles wie geplant läuft, will der leitende Ingenieur vor Ort miterleben. Sein Arbeitsplatz wird dann auf der kühlen Oberfläche des Ekström-Eisschelfs der Antarktis sein, nahe der deutschen Polarforschungsstation Neumayer III. Der Feldversuch ist für das Frühjahr 2027 geplant. Davor soll es im April 2026 ein Test in einem grönländischen Fjord geben.
Das Eis des Ekström-Eisschelfs ist bis zu 200 m dick. Der Feldversuch ist für die Forschenden aber nur eine Etappe auf dem Weg zu ganz anderen Tiefen. Ende des Jahrzehnts soll der Roboter in der Dome-C-Region der Antarktis bis auf 4000 m Tiefe vordringen.


Roboter ist ein Unterwasserfahrzeug mit Hightech-Innenleben
Das Roboterfahrzeug ist gerade einmal 60 cm lang und hat einen Durchmesser von 10 cm. Trotz seiner wulstigen Nase ist es rein äußerlich eher unscheinbar. Einzigartig ist dagegen sein Innenleben. Diverse Sensoren, Kameras, Antriebstechnik, Batterie, Computerchips, Elektronik – „alles muss auf engstem Raum funktionieren und die Fähigkeit haben, mit einem Umgebungsdruck von bis zu 400 bar in der Dome-C-Region klarzukommen“, beschreibt Projektleiter Ralf Bachmayer eine der Herausforderungen. Er ist Professor am Marum – Zentrum für Marine Umweltwissenschaften der Universität Bremen. Das Marum leitet das Teilprojekt: Triple-nanoAUV 2. An der Entwicklung des autonomen Unterwasserfahrzeugs (Autonomous Underwater Vehicle – AUV) ist neben Industriepartnern zudem das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) beteiligt.
Hauptaufgabe des Roboters: Lebensspuren unter dem Eis finden
Erreicht der Miniroboter sein Ziel, muss er seine Hauptaufgabe erledigen. Im Projektteil „Triple Life Detect“ soll die kleine Maschine Lebensspuren unter dem Eis messen, nach Kohlen-, Wasser-, Sauer- und Stickstoff suchen, aber auch nach Umwelt-DNA, die Rückschlüsse auf die aktuellen und früheren Bewohner zulässt. Dazu kommen Unterwassersensoren zum Einsatz, für deren Entwicklung eine weitere Mitgliedseinrichtung der U Bremen Research Alliance an Triple beteiligt ist: das Alfred-Wegener-Institut (AWI), Helmholtz-Zentrum für Polar- und Meeresforschung. „Wir entwickeln gemeinsam mit Partnern die wissenschaftlichen Anwendungen zu den Geräten“, erläutert Malte Pallentin, Ingenieur am AWI. Denn bisher würden AUVs in der Tiefsee nur ein bis zwei Parameter messen. Der Miniroboter soll hingegen in der Lage sein, ganz unterschiedliche Spuren des Lebens zu erfassen.