Nvidia und Intrinsic erhöhen Tempo beim Einsatz von Robotern
Was nötig ist, um Roboter noch schneller einsatzbereit zu bekommen, zeigten die beiden Tech-Unternehmen zusammen mit Maschinenhersteller Trumpf auf der Messe Automate in Chicago.
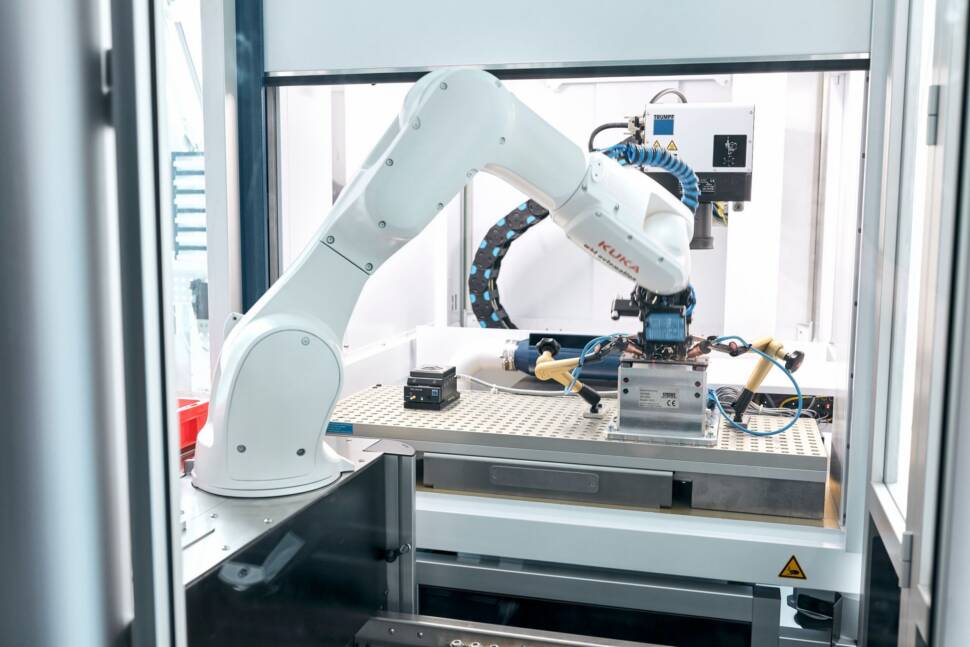
Foto: TRUMPF Gruppe
Inhaltsverzeichnis
Es soll der nächste große Schritt zum intuitiven Einsatz von Robotern sein und Anwendern noch mehr Aufgaben beim Einrichten von automatisierten Anlagen abnehmen. Auf der Fachmesse Automate Robco vom 6. bis 9. Mai 2024 in Chicago haben Chipspezialist Nvidia und Intrinsic – die Robotik-Tochter des Alphabet-Konzerns – diese Woche dazu eine gemeinsame Entwicklung vorgestellt. Als Ergebnis wurde eine Anwendung des deutschen Maschinenbau-Unternehmens Trumpf präsentiert, bei der unterschiedliche Blechteile aus einer Kiste gegriffen und an anderer Stelle sortiert abgelegt werden. Zum Training wurden laut den Partnern rein synthetische Daten genutzt, die zuvor per Software generiert wurden. In der physischen Anwendung zu sehen ist der fertige Prozess in einem Video von Intrinsic:
Hier wird Ihnen ein externer Inhalt von youtube.com angezeigt.
Mit der Nutzung des Inhalts stimmen Sie der Datenschutzerklärung
von youtube.com zu.
Welche Technik von Nvidia und Intrinsic hilft beim Greifen per Roboter?
Grundlagen für die Blechanwendung liefern die spezifischen Plattformen von Nvidia und Intrinsic. Vom Chiphersteller kommen skalierbare Basismodelle für die Manipulation von Bauteilen aus seinem Softwarepaket Nvidia Isaac Sim. Im „Isaac Manipulator“ wurde beispielsweise die Greiffertigkeit anhand von 100 % synthetischen Daten trainiert, um das Greifen von Objekten in der Simulation und später in der Realität ausführen können. Anstatt einen bestimmten Greifer fest zu kodieren, damit er die Objekte auf eine bestimmte Art und Weise greift, wird dabei der Code für den Greifer und das jeweilige Objekt automatisch generiert.
Lesetipp: Schnelle Chips für digitale Fabriken
Grundsätzlich ist der Isaac Manipulator eine Sammlung von Basismodellen und modularen Bibliotheken, die von den Grafikprozessoren (GPU) des Unternehmen beschleunigt werden. Sie sollen Unternehmen in der Industrieautomatisierung dabei helfen, skalierbare und wiederholbare Workflows für dynamische Manipulationsaufgaben aufzubauen, um damit das Training von KI-Modellen und die Neuprogrammierung zu beschleunigen. Die KIneutralen Datenmodelle werden dazu in der Regel auf riesigen Datensätzen trainiert und können verwendet werden, um beispielsweise Sensor- und Roboterinformationen in ähnlicher Weise zu verarbeiten und zu verstehen, wie es ChatGPT mit Textinformationen macht.
Roboter können mit verschiedenen Objekten in ihrer Umgebung interagieren
Damit ist es laut Nvidia möglich, dass Roboter Aufgaben interpretieren und auch ohne vorherige Beispiele ausführen können. Diese Lernmethode wird deshalb auch als Zero-Shot-Learning bezeichnet. „Mit den neuesten KI-Grundlagenmodellen können Unternehmen eine Vielzahl von Roboterkonfigurationen programmieren, die in der Lage sind, zu verallgemeinern und mit verschiedenen Objekten in realen Umgebungen zu interagieren“, sagt Deepu Talla, Vice President of Robotics and Edge Computing bei Nvidia.
Lesen Sie auch: Wie Intrinsic den Einsatz von Robotern erleichtern will
Von Alphabets Robotikschmiede Intrinsic kommt die webbasierte Entwicklungsplattform Flowstate für die Erstellung von Roboteranwendungen in der Industrie zum Einsatz. Komplexe Arbeitsabläufe werden darin in einem grafischen Prozess-Builder zusammengestellt und anwenderfreundlich dargestellt. Basis dafür ist die Open-Source-Plattform Gazebo, die von Open Robotics stammt, den Entwicklern des Roboterbetriebssystems ROS.
So nutzt Trumpf die Technik zum Greifen von Blechteilen
„In unseren aktuellen Lösungen werden die Greifpunkte entweder von Experten definiert oder werden durch regelbasierte Systeme berechnet“, sagt Thomas Schneider auf Anfrage der VDI nachrichten. Laut dem Geschäftsführer Entwicklung des Geschäftsbereichs Werkzeugmaschinen bei Trumpf erlaubt der neue Ansatz ein autonomes Berechnen der Greifpunkte und der Pfadplanung. „So entsteht eine robuste Greifstrategie, welche sich der aktuellen Situation in einer Produktionshalle anpassen kann“, erklärt er.

Lesetipp: Wie kleine Betriebe bei der Digitalisierung von den Vorleistungen der Konzerne profitieren
Zu den generellen Auswirkungen der neuen Lösungen für seine Branche sagt Schneider: „Die Robotik hat von je her die Herausforderung von kundenspezifischen Lösungen und nicht von Standardsystemen. Die in der Robotik erforschten und erprobten sensorbasierten und lernenden Komponenten können auch im klassischen Maschinenbau als Funktion übertragen werden. So kann beispielsweise der Materialfluss durch Einzelmaschinen erheblich verbessert werden.“
Bedeutung von Sensoren und Software-Komponenten wird immer größer
Bisher arbeiten Hersteller von Maschinen mit Systemintegratoren und Roboterherstellern zusammen. Den Einfluss der neuen Marktteilnehmer beurteilt Schneider so: „Maschinenbauer sollten sich für die Zusammenarbeit von Roboterherstellern und Roboterplattformen öffnen und diese wiederum in die eigene Gesamtarchitektur integrieren.“ Neben dem Roboter selbst würden künftig Sensoren und Software-Komponenten eine immer größere Rolle einnehmen. „Diese Elemente müssen bereits in der Konzeptionsphase einer neuen Maschine oder Anlage mitberücksichtigt werden und im Betrieb direkt mit der Maschinensteuerung kommunizieren, um Hauptzeitparallele Abläufe zu gewährleisten“, so der Maschinenbauexperte. Für sein Unternehmen stehe dabei der Kundennutzen stets immer im Vordergrund. „Mit dem Einsatz von sensorbasierten und lernenden Komponenten ermöglichen wir unseren Kunden einen erheblichen Wettbewerbsvorteil, da hierdurch individuelle und robuste Lösungen in eine Standardmaschine integriert werden“, hebt er hervor.















