Roboter: Damit die Mensch-Maschine-Interaktion nicht zur Bremse für die Produktivität wird
Arbeiten Mensch und Roboter in einem Arbeitsraum zusammen, muss die Maschine ihre Arbeitsgeschwindigkeit reduzieren, um den Menschen nicht zu gefährden. Mit einer neuen Lösung sollen Roboter nun 25 % schneller arbeiten können.
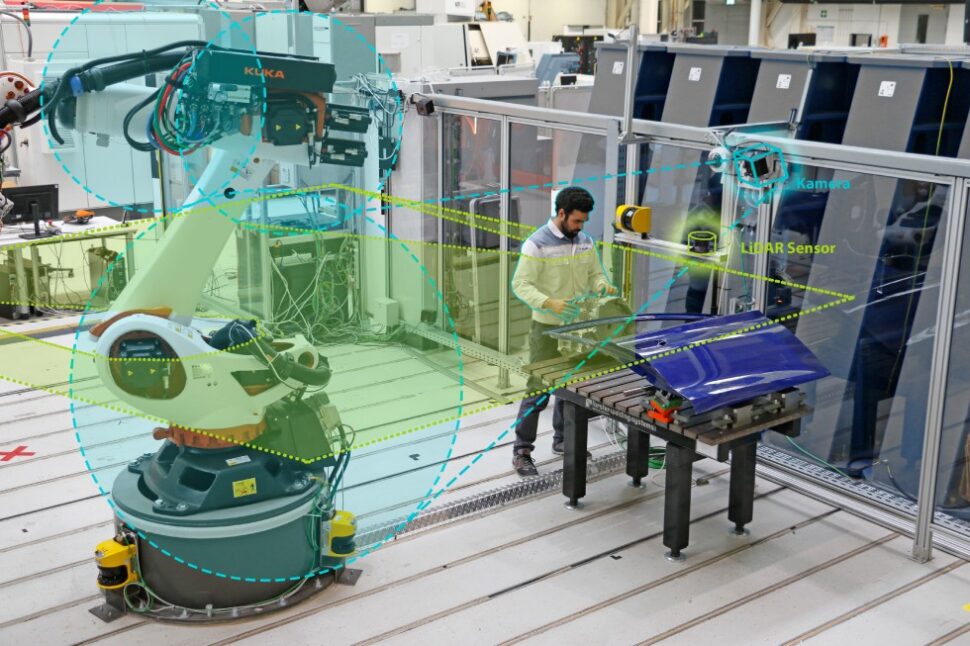
Foto: Fraunhofer IWU
Viele Roboterhersteller versprechen inzwischen eine direkte Zusammenarbeit (Kollaboration) zwischen Mensch und Roboter oder zumindest eine barrierefreie Koexistenz im selben Arbeitsraum. Tatsächlich ist das aber mit Einschränkungen verbunden: Während die Maschinen hinter Schutzzäunen mit hoher Geschwindigkeit arbeiten können, müssen sie in Anwesenheit von Menschen zu deren Schutz ihre Arbeitsgeschwindigkeit deutlich reduzieren. Das geht zu Lasten der Produktivität, weshalb viele Anwender letztlich weiterhin zu klassischen Lösungen greifen. Das soll sich bald ändern.
Lesetipp: Übernehmen Roboter bald Inspektionen in Chemieanlagen?
Im Rahmen des europäischen Forschungsprojekts „Sharework“ entwickelte ein Team vom Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik IWU zusammen mit sechs europäischen Forschungseinrichtungen und 13 Firmen einen Geschwindigkeitsregler sowie ein umfassendes System zur Wahrnehmung des Roboterumfelds. Laut Fraunhofer IWU muss auch mit diesem System die Roboterbewegung bei menschlicher Annäherung verlangsamt werden, allerdings deutlich weniger als bisher. Das Forscherteam spricht von rund 25 % schnelleren Roboterbewegungen als bisher. Für Anwender wäre das ein deutlicher Effizienzgewinn. Erprobt wurde die Lösung im Rahmen des Projektes beim zur Volkswagen AG gehörenden spanischen Automobilhersteller Seat.
Sicherer Robotereinsatz: Wahrnehmung des Umfelds per Kamera und LiDAR
Zunächst musste dafür die zuverlässige Wahrnehmung des Arbeitsumfelds sichergestellt werden. Dazu will man Kameras und LiDAR-Sensoren (Light Detection and Ranging) einsetzen. Die Sensoren erkennen und kategorisieren Objekte in einem größeren Umfeld über gepulstes Laserlicht, mit einer Reaktionszeit von 50 ms. Die Kameras erfassen dagegen das Nahfeld mit einer Reaktionszeit von 10 ms. Die höhere Arbeitsgeschwindigkeit des Roboters ergibt sich dabei durch die Kombination von Reaktionszeiten und Überwachungsbereichen beider Überwachungskonzepte.
Um welchen Faktor genau sich die Prozesszeiten verkürzen lassen, hängt laut den Forschenden jeweils von der Tätigkeit und von der eingesetzten Hardware für Robotik und LiDAR-Sensorik ab. Nach Einschätzung des Forschungsteams erhöhen Anpassungsmöglichkeiten bei Bewegungsgeschwindigkeit und Beschleunigung dabei die Akzeptanz bei den Mitarbeitenden.


Lesen Sie auch: Spezialisierung statt Universalroboter
Neben der Hardware wurde dazu auch Software entwickelt. Teil des Softwarepakets ist beispielsweise ein Baustein für die Beurteilung aller Sicherheitsaspekte. Damit können diese frühzeitig in der Anlagenplanung berücksichtigt, technisch dokumentiert und digital zertifiziert werden. So steht gleichzeitig ein digitales Abbild (digitaler Zwilling) der Anlage mit allen relevanten Daten für spätere Änderungen zur Verfügung.
Interaktion mit dem Schwerlastroboter
Die verschiedenen Software- und Hardwaremodule ermöglichen laut den Forschenden insbesondere auch Schwerlastrobotern die Interaktion mit Menschen. Auf physische Schutzbarrieren wie Zäune könne dabei verzichtet werden, ohne Abstriche bei der Sicherheit eingehen zu müssen. Arbeitsschwerpunkt für das Fraunhofer IWU waren dabei übergreifende Sicherheitsaspekte. Damit sei das modulare System nun in der Lage, die Umgebung eines Roboters und menschliche Handlungen zu verstehen. Dazu nutzt das System Sensordaten und Anwendungswissen, Vorhersagen über zukünftige Zustände, intelligente Datenverarbeitung, Augmented Reality sowie Gesten- und Spracherkennungstechnologie. Neben der Anwendung in der Automobilindustrie wurden die entwickelten Module bereits in der Bahn-, Metall- und Investitionsgüterindustrie erprobt. Denkbar sei auch ein Einsatz in anderen industriellen Montage- und Produktionsprozessen.













