Automation









Automation
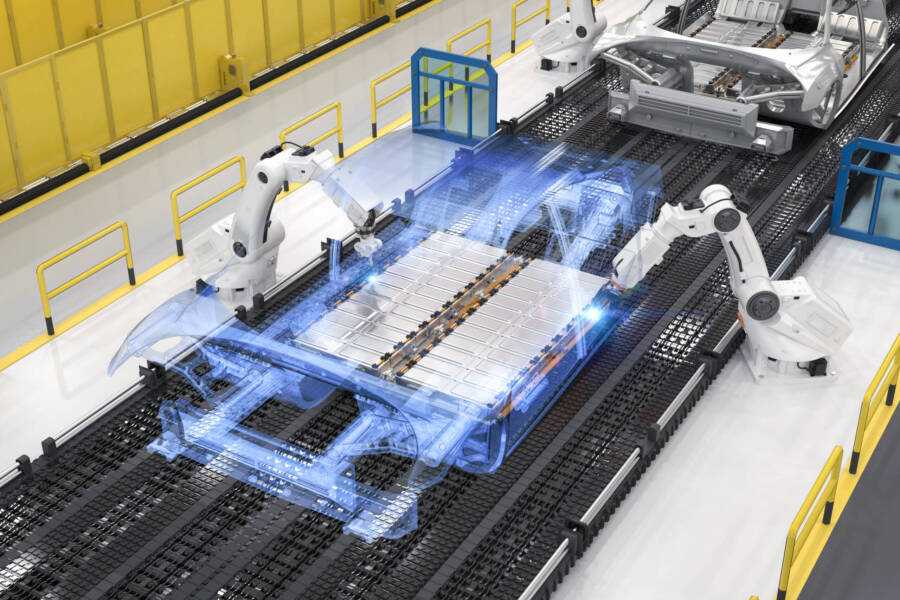
Automatisierungstechnik ist der Schlüssel zur Verbesserung von Produktivität und Ressourceneffizienz. Smarte Fabriken entstehen nach dem Konzept von Industrie 4.0.



Meistgelesen
Technik

Karriere

Automation
Automatisierungstechnik ist der Schlüssel zur Verbesserung von Produktivität und Ressourceneffizienz. Smarte Fabriken entstehen nach dem Konzept von Industrie 4.0.