Robotik-Programmierung spielerisch vertiefen
Industrieroboter sind heute vielerorts unverzichtbar, doch deren Programmierung will gelernt sein und nicht jeder hat einen Industrieroboter zur Verfügung. Ab Ende September will Fischertechnik mit seinem neuen Robotics TXT Controller und einer komfortablen Programmiersoftware den Einstieg in die Robotik und die Vertiefung entsprechender Kenntnisse vereinfachen.
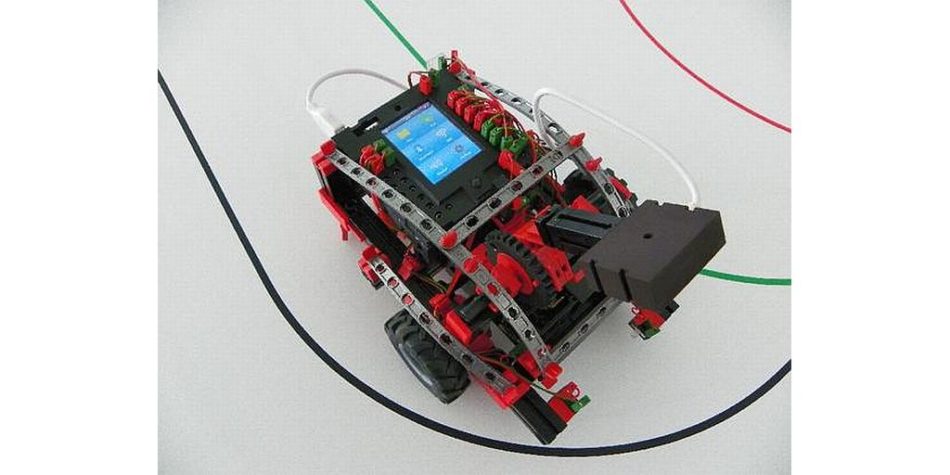
Foto: P. Pernsteiner
Die Robotik erfreut sich in vielen Industriebereichen einer zunehmenden Beliebtheit. Über vieles wird derzeit nachgedacht – auch über die bislang obligatorischen speicherprogrammierbaren Steuerungen (SPS) und vereinfachte Lösungen mit fertigen Funktionsbausteinen. Mit den Anforderungen in der Praxis steigen auch die Anforderungen in der Ausbildung. Doch echte Roboter sind teuer. So ist es kein Wunder, dass in mancher Lehrwerkstatt, Berufs- und Hochschule Fischertechnik-Baukästen stehen und spielerisch einfach die ersten Robotik-Programmierkenntnisse vermitteln.
Auch wenn die Bausteine vertraut erscheinen, so hat sich die IT-Technik in den Kreativ-Baukästen von Fischertechnik in den vergangenen 30 Jahren deutlich gewandelt. Was 1984 mit einer Schnittstelle für den Commodore 64 begann, mündete 2004 in die PC-Programmieroberfläche „RoboPro“. Sie ist an Fluss- und Ablaufdiagramme angelehnt und hat laut Hartmut Knecht, Entwicklungsleiter bei Fischertechnik, ein großes Einsatzpotenzial: „Die grafische Benutzeroberfläche von RoboPro eignet sich nicht nur für Jugendliche, sondern auch für Ingenieure und Techniker, die lange nicht mehr programmiert haben und einen Einstieg in die Robotik suchen.“
Die Software wurde kontinuierlich weiterentwickelt, ist aber laut Knecht kompatibel geblieben: „Es ist völlig egal, ob am PC ein 10 Jahre altes Robo-Interface hängt, der seit 2009 lieferbare Robo-TX-Controller, der neue Einsteiger-Controller Robotics LT oder der ab September erhältliche Hochleistungscontroller Robotics TXT. Im Menü wird nur selektiert, welcher Controller angesteuert werden soll und schon gibt es den angepassten Befehlsumfang.“
Derzeit wird RoboPro umfassend überarbeitet, denn mit Robotics TXT will Fischertechnik einen Innovationssprung vollziehen. Das kompakte Steuergerät hat einen berührungssensitiven Farbbildschirm und kann vier Motoren mit Rückmelder zur Positions- und Drehrichtungserkennung ansteuern. Für Kontakte und Sensoren hat er acht Universaleingänge und vier schnelle Zähleingänge. An die USB-Buchse lässt sich ein Speicherstick oder die mitgelieferte Farbkamera anschließen. Die Verbindung zum PC erfolgt per Mini-USB.

Das ist für Knecht erst der Anfang: „Wer möchte, kann mehrere Controller zu einem Master-Slave-System verketten. Auch Industriesensoren mit I2C-Schnittstelle lassen sich anstecken – selbst die preiswerten C-Control-Sensoren von Conrad.“ Die Funkkommunikation mit Tablets, Smartphones oder anderen Controllern sei per Bluetooth oder WLAN möglich. Der Arbeitsspeicher ist mit 128 MB üppiger bestückt, als in mancher SPS, und der Flash-Speicher kann per MicroSD-Karte bis 32 GB erweitert werden.


Die Software erlaubt vielfältige Anwendungen. So kann die Kamera zur autarken Fahrzeugsteuerung genutzt werden. Es lassen sich Bildbereiche definieren, in denen Bewegungen oder Farben erkannt werden, um Fahrbefehle zu generieren. Auch die Echtzeit-Videoübertragung und die gleichzeitige Fernsteuerung über ein Smartphone sind möglich.
Mit seinem Linux-basierten Open-Source-Betriebssystem ist der TXT Controller offen für die individuelle Programmierung. So ist denkbar, den Infrarotempfänger des Controllers an eine TV-Fernbedienung anzupassen oder direkt auf die I2C-Schnittstelle zuzugreifen. Selbst für Standardprogrammiersprachen ist der Controller offen. Hierzu bietet Fischertechnik im Internet kostenlose Datenpakete für Programmiersprachen wie C++, Java oder Visual Basic.
Wer sich nach Vertiefung der RoboPro-Kenntnisse fit für SPS-Roboter fühlt, kann dies mit entsprechenden Fischertechnik-Modellen forcieren. Sie ermöglichen die realistische Nachbildung von realen Abläufen – vom 3-D-Greifer mit Taktstraßen-Anbindung bis zum Hochregallager.
Wird eine SPS genutzt, ist kein Robotics-TX- oder TXT-Controller nötig. Stattdessen dient eine Relais-Leiterplatte als Schnittstelle zur Steuerung von Fischertechnik-Motoren via SPS. Der Steuerungsspezialist Staudinger hat dafür komplexe Fischertechnik-Simulationsmodelle entwickelt, die direkt mit der SPS-üblichen 24-Volt-Technik ausgestattet sind.
Damit gehört Fischertechnik bereits zum Inventar so manches Aus- und Weiterbildungsbetriebes. Natürlich werden die Baukästen auch in der Lehrwerkstatt von Fischer genutzt. Im ersten Mechatronik-Lehrjahr programmieren die Auszubildenden mit RoboPro. Dann erfolgt der Umstieg auf Simulationsmodelle und die Siemens-SPS-Simatic S7–300. Werden allerdings die vor dem Abschluss stehenden Mechatroniker von Fischer zu ihren Erfahrungen befragt, ist die Antwort deutlich: Viele empfinden den Wechsel von RoboPro auf SPS als Rückschritt.
Dies bestätigt auch Michael Zanker, Teamleiter der Fischer-Lehrwerkstatt: „Beim Umstieg auf die im Lehrplan geforderte Programmierung nach IEC knirscht es leider, weil sie umständlicher ist, als die grafische Programmierung unserer Robotik-Baukästen.“ Mit dem neuen Robotics-TXT-Controller werde der Unterschied womöglich noch größer. Zanker ist aber zuversichtlich: „Trotzdem möchte ich diesen Schritt wagen, denn beispielsweise sind Kameras heute in der Robotik so allgegenwärtig, dass man schnellstmöglich damit Erfahrungen sammeln sollte. Deshalb freue ich mich sehr, dass wir diese Technologie bald spielerisch einfach ergründen können.“









