Wie Robotik und Logistik vom maschinellen Lernen profitieren
Anwendungen künstlicher Intelligenz (KI) werden immer konkreter. Die Technik kann helfen, Roboter zu kalibrieren und Störungen in Lieferketten zu vermeiden.
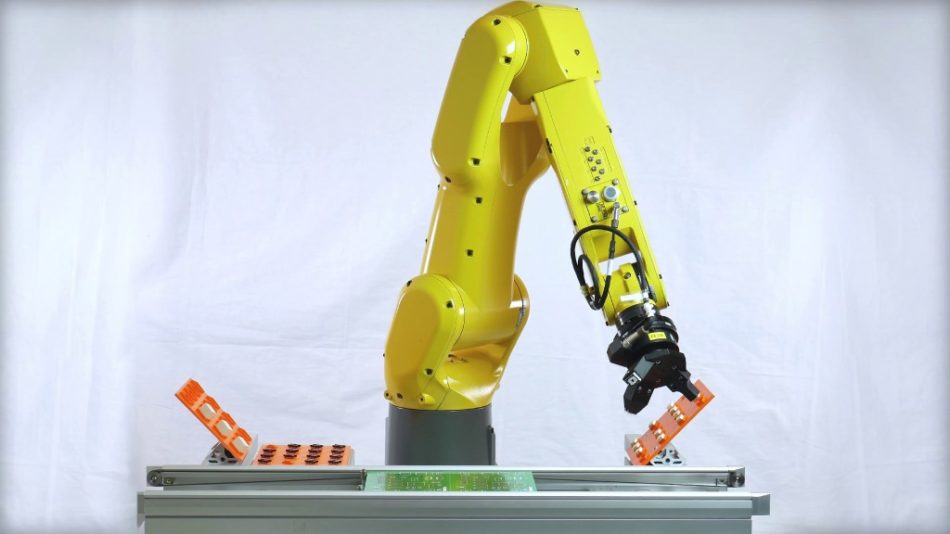
Foto: ArtiMinds Robotics GmbH
Roboter erfreuen sich längst nicht mehr nur in der Automobilproduktion zunehmender Beliebtheit. Das gilt insbesondere für einfache Lösungen, die von Anwendern leicht zu konfigurieren sind. Allen Systemen gleich ist allerdings, dass sie regelmäßig kalibriert werden müssen, damit sie präzise arbeiten. Genau das soll im Rahmen des Forschungs- und Entwicklungsprojekts zur KI-basierten Roboterkalibrierung – kurz Kirk – vereinfacht werden. Konkret werden dabei durch maschinelles Lernen softwaregetriebene Kalibriermethoden für Industrieroboter entwickelt, um deren Genauigkeit im Betrieb zu verbessern.
Warum ist Kalibrieren wichtig?
Üblicherweise müssen die Robotersysteme in regelmäßigen Abständen individuell nachkalibriert werden, um auch nach längerer Einsatzdauer noch präzise arbeiten zu können. Das ist kosten- und zeitintensiv. Vor allem für kleinere und mittlere Unternehmen bedeutet das einen erheblichen Mehraufwand. Dazu kommt, dass gerade bei preiswerten Roboterarmen mechanisch bedingt potenziell mit zunehmender Einsatzdauer noch größere Ungenauigkeiten in der Positionierung auftreten.
Mit derzeit verfügbaren Kalibriermethoden lassen sich nach Ansicht des Kirk-Entwicklerteams vorwiegend Geometriefehler korrigieren. Andere für die Positioniergenauigkeit relevante Faktoren wie temperatur- oder lastabhängige Ungenauigkeiten könnten dagegen nur ungenügend ausgeglichen werden. Auch eine Kalibrierung im laufenden Betrieb sei derzeit nicht möglich, obwohl damit der Prozess optimiert werden könnte.
Software übernimmt Kalibrieraufgaben
Basierend auf maschinellem Lernen, wollen die Partner des Gemeinschaftsprojekts Kirk nun neue softwaregetriebene Kalibriermethoden für die Praxis entwickeln. Initiatoren des im April gestarteten Projekts sind der Robotikexperte ArtiMinds Robotics, die Universität Stuttgart und die Duale Hochschule Baden-Württemberg Karlsruhe. „Die Möglichkeit, Daten automatisiert zu erfassen und zu analysieren, verringert den Aufwand für den Anwender und erleichtert es insbesondere KMU, die notwendige Kompetenz aufzubauen, um ein Robotersystem optimal zu nutzen“, verdeutlicht Darko Katic. Er ist technischer Ansprechpartner für das Kirk-Projekt und Teamleiter Künstliche Intelligenz bei ArtiMinds. Ziel sei es dabei, die Genauigkeit durch Softwarealgorithmen so zu erhöhen, dass Roboter für ein breites Anwendungsspektrum flexibel eingesetzt werden können. Arbeitsabläufe sollen dabei durch eine vom Robotertyp und -hersteller unabhängige Lösung vereinfacht werden.
Um die komplexen Zusammenhänge aus äußeren Faktoren sowie den zeitlich veränderlichen Eigenschaften des individuellen Roboters beherrschbar zu machen und damit die Positioniergenauigkeit zu erhöhen, setzt KI-Forscher Marco Huber vom Institut für Industrielle Fertigung und Fabrikbetrieb (IFF) der Universität Stuttgart dazu auf maschinelles Lernen mit tiefen neuronalen Netze – sogenanntes Deep Learning. Das IFF ist dabei zusammen mit dem Robot and Human Motion Lab (RaHM-Lab) der Dualen Hochschule Baden-Württemberg Karlsruhe für die Grundlagenforschung zuständig.


Letztlich möchte das Entwicklungsteam die Ergebnisse auf reale industrielle Anwendungsfälle übertragen. Darüber hinaus sollen die neu entwickelten Methoden zum Projektende im Frühjahr 2022 auch in die Programmiersoftware Robot Programming Suite von ArtiMinds integriert werden.
Zuverlässigkeit von Logistiknetzwerken steigern
Seit Kurzem bereits abgeschlossen ist dagegen schon das Logistikprojekt Smecs (Smart Event Forecast for Seaports). Darin hat das Fachgebiet Logistik der TU Berlin gemeinsam mit der DB Cargo AG und der Kühne Logistics University den Einsatz von maschinellem Lernen im Hinblick auf die steigenden Anforderungen an Zuverlässigkeit und Effizienz industrieller Lieferketten untersucht, um deren einzelne Prozessabschnitte besser künftig synchronisieren zu können – insbesondere auch im Falle von Störereignissen. „Machine Learning bietet ein hohes Potenzial zur Bewältigung dieser Herausforderungen, indem Ineffizienzen und Konflikte in den logistischen Netzwerken bereits im Voraus erkannt werden“, erläutert Projektleiter Frank Straube, der zudem Fachgebietsleiter an der TU Berlin ist.
In dem Projekt wurden intermodale Transportketten untersucht. Konkret ging es darum, die verschiedenen Transport- und Umschlagprozesse von Seefrachtcontainern im kombinierten Verkehr Straße-Schiene vom Verlader bis zum Seehafen zu optimieren. Dazu wurde zunächst ein KI-System entwickelt, das vor Abfahrt beim Verlader die Ankunftszeiten von Transportaufträgen an wichtigen Prozessschnittstellen prognostiziert. Fachleute sprechen von der „Estimated Time of Arrival“ – kurz ETA. Zugleich detektiert die Software darauf basierende Störungen entlang der logistischen Kette und gibt geeignete akteurspezifische Maßnahmen aus.
Zerlegung in Teilprobleme
Um die vielfältigen Zusammenhänge verarbeiten zu können, wurde die Gesamtkette für das maschinelle Lernen in verschiedene Teilprobleme zerlegt, für die jeweils individuelle Vorhersagemodelle entwickelt wurden. Beispiele dafür sind Prognosemodellen für den Straßen- und Schienentransport sowie Modelle für Umschlags- und Rangierprozesse in den logistischen Knotenpunkten. Dazu nutzte das Projektteam abhängig von der jeweiligen Aufgabenstellung verschiedene Verfahren auf Basis des überwachten Lernens von KI-Systemen. Darüber hinaus wurden auch Verfahren des unüberwachten Lernens in der Entwicklung eingesetzt. Diese eignen sich beispielsweise, um häufig gemeinsam auftretende Störungsarten und entsprechende Störungsmuster zu identifizieren.
Als Erfolgsfaktor betrachtet Straube neben der Auswahl passender Verfahren die Identifizierung und Einbindung geeigneter Datenarten für das maschinelle Lernen. Für den Anwendungsfall im Smecs-Projekt wurden dazu historische Daten aus insgesamt 15 verschiedenen IT-Systemen unterschiedlicher Akteure für vier Jahre in die Prognose einbezogen. Gut 50 000 Schienentransporte und 100 000 Straßentransporte kamen dabei zusammen.
Die während der Projektlaufzeit entwickelten prozessbezogenen Teilmodelle wurden schließlich in ein Gesamtsystem integriert, das die Berechnung einer Ankunftszeit (ETA) für einen bestimmten Transportauftrag ermöglicht. „Für teilweise mehrtägige Gesamtdauern des maritimen Vorlaufs belaufen sich die Abweichungen der Prognosen zu den tatsächlichen Zeiten für viele Aufträge im zweistelligen Minutenbereich – auch im Falle von störungsbedingten Verspätungen“, freut sich Straube. Das sei gegenüber bisherigen Prognoselösungen sehr vielversprechend.
Onlinedemonstrator zeigt Funktionsweise
Über die Prognosefunktion hinaus unterstützt das im Rahmen des Smecs-Projekts entwickelte System auch die Entscheidungsfindung. In Abhängigkeit der ETA-Prognose werden dazu Anschlusskonflikte der einzelnen Prozesse automatisch detektiert und den beteiligten Akteuren Empfehlungen für optimierende Maßnahmen bereitstellt. Der im Projekt entwickelte Prototyp wurde in Form einer webbasierten Anwendung für die Öffentlichkeit bereitgestellt. Nutzer können damit die Potenziale von maschinellem Lernen am Beispiel ausgewählter historischer, anonymisierter Transportaufträge erproben.









