Logistikanwendungen zeigen, wohin die Entwicklung in der Sensorik geht
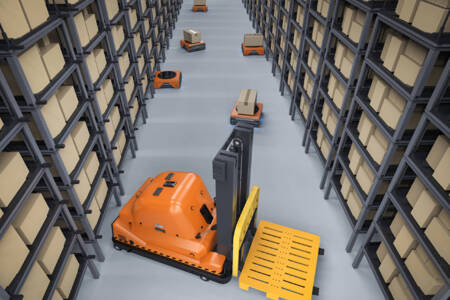
Sensorhersteller Sick AG aus Waldkirch profitiert vom zunehmenden Geschäft mit der Lagerlogistik. Gerade hat das Unternehmen wieder einen neuen Sensor für die Rasterlokalisierung von fahrerlosen Transportsystemen vorgestellt. Im Gespräch mit den VDI nachrichten erklärt Michael Repplinger, Head of Business Unit Mobile Platforms bei Sick, warum es für ihn immer weniger um die einzelnen Technologien geht.

Foto: SICK AG.
Es gibt mehrere Methoden, fahrerlose Transportsysteme (FTS) durch Fabriken zu navigieren. Im einfachsten Fall verfolgen sie feste Markierungen auf dem Boden. Sie können aber auch anhand von QR-Codes von Station zu Station navigieren oder scannen ihre Umgebung komplett. So oder so sind Sensoren gefragt, wie sie unter anderem von der Sick AG in Waldkirch entwickelt werden. Gerade erst hat das Unternehmen seine neue Produktvariante GLS611 zur Rasterlokalisierungslösung vorgestellt. Der kompakte Sensor erfasst auch stark beanspruchte Code-Etiketten, die zur Fahrzeugnavigation auf dem Boden angebracht sind. Bereits im Februar wurde der sichere Mehrstrahlscanner scanGrid2 vorgestellt. Der kompakte Sensor nutzt die neue und eigenentwickelte Solid-state-Lidar-Technologie und ist for allem für kleine fahrerlose und spurgeführte Transportfahrzeugen konzipiert. Für solche kleinen Fahrzeuge waren die herkömmlichen Sicherheitslaserscanner – wie Lidar-Sensoren auch genannt werden – bisher zu teuer.

In der höchsten Preisklasse navigieren 3-D-Lidar-Sensoren mit speziellen Kameras die fahrerlosen Systeme durch die Hallen. Während der Laserstrahl des Lidar-Sensors auch sehr gut im Dunklen arbeiten kann, liefern die sogenannten Time-of-flight-Kameras neben den Entfernungsinformationen eine Fülle weiterer Daten. Letztere reagieren aber empfindlicher auf Umgebungseinflüsse wie Blendung, weshalb die Einsatzzwecke immer abzuwägen sind. „Primäre Funktion der Sensoren war es anfangs Personen und Objekte zu erkennen, um Kollisionen zu vermeiden. Später wurde das Scannen der Umgebung immer relevanter“, erklärt Michael Repplinger. Für den Head of Business Unit Mobile Platforms bei Sick in Waldkirch geht es aber immer weniger darum, einzelne Technologien zu bewerten. „Spannend wird es, wenn man Technologien kombiniert“, sagt er. Seine Einheit entwickelt anwendungsspezifische Softwarelösungen und beobachtet den FTS-Markt, um Trends zu erkennen.
Umgebungsdaten liefern Mehrwert
Die Lokalisierungssoftware von Sick fungiert dabei als Basis für Navigationssysteme. Sie nutzt die vom Sensor erfassten Konturen und gleicht sie mit einer zuvor bereitgestellten Karte der Umgebung ab. Damit erfolgt schließlich die Ortung im Raum.
Bisher würden die Sensordaten der FTS lediglich dafür genutzt, deren Umgebung zu erfassen, Objekte auf dem Fahrweg zu erkennen und im Sinne der Sicherheit Kollisionen zu vermeiden. „Natürlich könnten wir für jede Teilfunktion einen eigenen Sensor einbauen“, erklärt Repplinger. Aus Anwendersicht sei es besser, mehr Funktionen mit den bestehenden Geräten zu realisieren, z. B. indem Daten im Sensor aufbereitet oder auch anders genutzt werden können. Repplinger: „Der Lidar-Sensor ist genauso gut geeignet, eine Palette zu erkennen, die irgendwo aufgenommen werden soll, oder eine bestimmte Maschine, die angesteuert werden soll.“

Gleichzeitig ist es für Repplinger im nächsten Schritt sinnvoll, die Daten, die bisher lokal auf dem Fahrzeug vorliegen, auch an andere Fahrzeuge und die Infrastruktur weiterzugeben. Er stellt fest: „Durch eine entsprechende Kommunikation, könnten dann z. B. Funktionen wie ein Blick um die Ecke realisiert werden. So könnten sich zwei Fahrzeuge bereits vor einem Kreuzungspunkt verständigen, wer zuerst einfahren darf, bevor beide Systeme anhalten müssen.“


Systemgrenzen verschieben sich
„Wenn wir über Kommunikation reden, dann schauen wir als Sensorhersteller inzwischen weit über die Funktionen der einzelnen Sensoren hinaus. Der Sensor ist zwar weiterhin ein Datenlieferant, aber der Trend geht dahin, die Daten in einem größeren Zusammenhang zu nutzen und mit Softwarebausteinen zu verarbeiten“, macht der Experte deutlich. „Unsere Sensoren liefern viel mehr Daten, als in den meisten Basis Anwendungen genutzt werden“, sagt er. Der Trend gehe inzwischen dahin, Sensoren stärker zu vernetzen, Daten aufzubereiten und in andere Systeme zu spielen. Das sei deshalb wichtig, weil die Menge an Daten sonst explodiere und der Aufwand, unstrukturierten Daten aufzubereiten, weiter steige. „Anwender wie die FTS-Hersteller möchten sich in der Regel nicht immer mit den Rohdaten beschäftigen, sondern wünschen sich aufbereitete Daten, durch die ihnen ein Vorteil entsteht. Wir nehmen ihnen die Rohdaten aber nicht ab, sie bleiben trotzdem uneingeschränkt erhalten“, macht er deutlich.
Sensorfusion und Software
Auch durch die Fusion von Sensordaten könnten Aufgaben im Umfeld des Fahrzeugs übernommen werden. Grundsätzlich brauche es dazu nicht einmal besonders leistungsfähige Sensoren. „Wir können aus mehreren einfachen Sensoren und bestehenden Systemen noch viel mehr rausholen. Das erfordert allerdings mehr Aufwand, meist in Form von Software, oder unter Zuhilfenahme von Deep-Learning-Algorithmen und künstlicher Intelligenz“, erklärt er. Dieses Vorgehen lohne sich insofern, dass die bewährten Technologien weiter genutzt werden können und das Gesamtsystem trotzdem beherrschbar bleibe.