ESA-Astronaut steuert erstmals vierbeinigen Roboter aus dem Weltall
Damit die Fernsteuerung von Robotern trotz Zeitverzögerung über die riesige Distanz gelingt, erprobt ESA-Astronaut Marcus Wandt ein neues Verfahren. Er nutzt Avatare.

Foto: DLR (CC BY-NC-ND 3.0)
Kollaborative, intelligente Roboter sollen Raumfahrende künftig bei Erkundungsmissionen zum Mond oder Mars unterstützen. Doch bis das zuverlässig funktioniert, gilt es einige technische Herausforderungen zu lösen. Eine davon ist der Umgang mit den Zeitverzögerungen bei der Signalübertragung, die der großen Entfernung zwischen der Erde und dem Weltraum geschuldet ist. Im Marslabor des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Oberpfaffenhofen läuft deshalb das Experiment „Surface Avatar“. Avatare sind digitale Zwillinge des Zielobjektes, die seinen aktuellen Zustand abbilden. Surface Avatar vereint nun die Erfahrungen aus verschiedenen Experimenten zur Teleoperation von Robotern in einem einzigen. Dabei überwacht es die Autonomie mehrerer Roboter und nutzt eine Force-Feedback-Steuerung für feinfühlige Handhabungsaufgaben.
Signale aus dem Weltall: Zeitverzögerung zwischen Erde und ISS im Fokus
Es herrscht konzentrierte Stille – eine Verbindung zur Internationalen Raumstation ISS ist aufgebaut. Das grüne Licht für das Experiment leuchtet und der schwedische ESA-Astronaut Marcus Wandt kommandiert vom Columbus-Modul aus den ersten von insgesamt drei Robotern im irdischen Marslabor. Das Entwicklungsteam testet dabei, wie sich insbesondere die Zeitverzögerung auf das Steuern von Robotern bei Weltraummissionen auswirkt.
Lesetipp: Das sind die schubstärksten Motoren der Raumfahrtgeschichte
Gemeinsam entwickelt das Forschungsteam neuartige Technologien, die es einem Menschen erlauben, alleine mehrere Roboter feinfühlig zu steuern. Dabei geht es auch darum, die Maschinen teil- oder vollautonom agieren zu lassen sowie eine Aufgabe von unterschiedlichen Robotern gemeinsam ausführen zu lassen. Geleitet wird das Projekt „Surface Avatar“ vom DLR-Institut für Robotik und Mechatronik. Die Umsetzung erfolgt in Zusammenarbeit mit der Europäischen Weltraumorganisation ESA und dem Deutschen Raumfahrtkontrollzentrum GSOC.
Weltpremiere in der Telerobotik
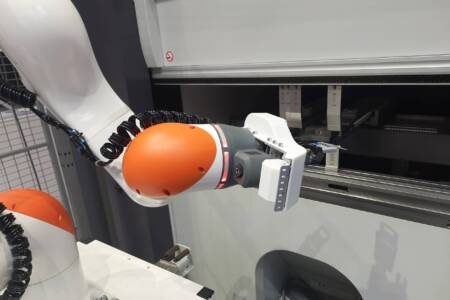
In dem neuen und komplexeren Experiment-Set-up stieß erstmals der vierbeinige DLR-Roboter Bert dazu und eröffnete damit eine Weltpremiere in der Telerobotik. Bisher wurden ausschließlich radbetriebene Roboter von Astronauten aus dem Weltall ferngesteuert. Bert beherrscht mehrere Gangarten. Dank seiner beinbasierten Fortbewegung kann er unwegsames Terrain einschließlich kleiner Höhlen erkunden, die seine rollenden Teamkollegen nicht erreichen. ESA-Astronaut Marcus Wandt ließ den Vierbeiner daher die Umgebung auskundschaften und das Gelände mit seinen Kameraaugen überwachen. Dank Berts Informationen im Hintergrund konnte sich Wandt den anderen Robotern zuwenden: dem humanoiden Serviceroboter Rollin‘ Justin des DLR sowie dem Interact Rover der ESA.


„Zukünftige Mond- und Marsstationen, einschließlich der Habitate für Astronautinnen und Astronauten, werden von Robotern aufgebaut und gewartet werden, die unter Anleitung der Raumfahrenden agieren“, sagt Alin Albu-Schäffer, Direktor des DLR-Instituts für Robotik und Mechatronik. Er erklärt: „Unsere neuesten Regelungs- und KI-Algorithmen ermöglichen es einer einzigen Person, ein komplettes Team unterschiedlichster Roboter zu kommandieren.“ Mit dieser Technologie sei das DLR-ESA Team weltweit führend.
Lesen Sie auch: BMW will humanoide Roboter in der Produktion einsetzen
Surface Avatar ist eines von zehn deutschen Experimenten der ESA-Mission
Damit sich die Forschenden während der zweieinhalb Stunden auf die wissenschaftlichen Aufgaben und Wartungsszenarien durch das Roboterteam konzentrieren konnten, hatte das Columbus-Kontrollzentrum in Oberpfaffenhofen die anderen Aktivitäten an Bord der ISS im Blick und sorgte für den zuverlässigen Betrieb. So gehört Surface Avatar zu insgesamt zehn deutschen Experimenten, die ESA-Astronaut Marcus Wandt im Rahmen seiner Axiom Space Mission Muninn durchführt.